1 A mathematical model of the ship manoeuvring
motion can be used as one of the effective methods to check whether
a ship satisfies the manoeuvrability standards or not, by a performance
prediction at the full load condition and from the results of the
sea trial in a condition such as ballast.
2 Existing mathematical models of ship manoeuvring
motion are classified into two types. One of the models is called
a ’response model’, which expresses a relationship between
input as the control and output as its manoeuvring motion. The other
model is called a "hydrodynamic force model", which is based on the
hydrodynamic forces that include the mutual interferences. By changing
the relevant force derivatives and interference coefficients composed
of a hydrodynamic force model, the manoeuvring characteristics due
to a change in the ship’s form or loading condition can be estimated.
3 Furthermore, a hydrodynamic force model is helpful
for understanding the relationship between manoeuvring performance
and ship form than a response model from the viewpoint of design.
Considering these situations, this Appendix shows the prediction method
using a hydrodynamic force model. Certainly, the kind of mathematical
model suitable for prediction of the performance depends on the kind
of available data. There are many kinds of mathematical models.
4 In figure A2-1,
the flow chart of prediction method of ship manoeuvring performance
using a hydrodynamic force model is shown. There are in general various
expressions of a hydrodynamic force model in current practice, though
their fundamental ideas based on hydrodynamic considerations have
little difference. Concerning the hydrodynamic force acting on a ship
in manoeuvring motion, they are usually expressed as a polynomial
term of motion variables such as the surge, sway and angular yaw velocities.
5 The most important and difficult work in performance
prediction is to estimate such derivatives and parameters of these
expressions to compose an equation of a ship manoeuvring motion. These
hydrodynamic force coefficients and derivatives may usually be estimated
by the method shown in figure A2-1.
6 The coefficients and derivatives can be estimated
by the model test directly, by data based on the data accumulated
in the past, by theoretical calculation and semi-empirical formulae
based on any of these methods. There is also an example that uses
approximate formulae for estimation derived from a combination of
theoretical calculation and empirical formulae based on the accumulated
data. The derivatives which are coefficients of hydrodynamic forces
acting on a ship’s hull, propeller and rudder are estimated
from such parameters as ship length, breadth, mean draught, trim and
the block coefficient. Change of derivatives due to a change in the
load condition may be easily estimated from the changes in draught
and trim.
7 As mentioned above, accuracy of manoeuvring
performance predicted by a hydrodynamic force model depends on accuracy
of estimated results by hydrodynamic forces which constitutes the
equation of a ship manoeuvring motion. Estimating the hydrodynamic
derivatives and coefficients will be important to raise accuracy as
a whole while keeping consistency of relative accuracy among various
hydrodynamic forces.
8 A stage in which theoretical calculations can
provide all of the necessary hydrodynamic forces with sufficient accuracy
has not yet been reached. Particularly, non-linear hydrodynamic forces
and mutual interferences are difficult to estimate with sufficient
accuracy by pure theoretical calculations. Thus, empirical formulae
and databases are often used, or incorporated into theoretical calculations.
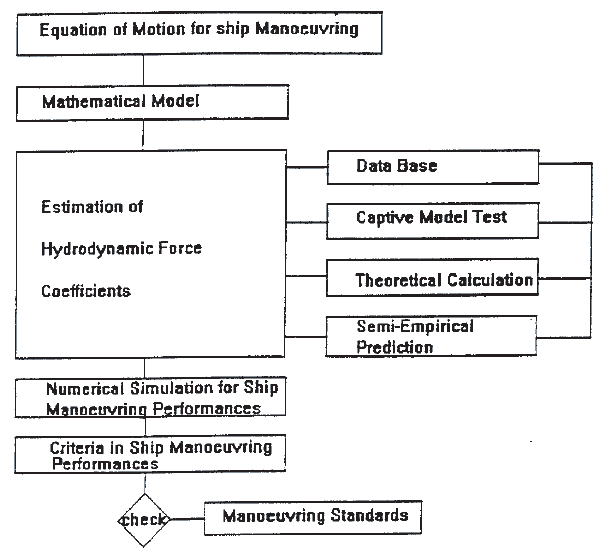
Figure A2-1 Flow chart for prediction of ship manoeuvring performance