1 Surface-piercing hydrofoils
1.1 Hull-borne mode
1.1.1 The stability should be sufficient to satisfy the provisions of 1.1.3 and 1.1.4
below.
1.1.2 Heeling moment due to turning
The heeling moment developed during manoeuvring of the craft in the displacement mode
may be derived from the following formula:
-
 (kNm)
(kNm)
where:
-
MR = moment of heeling;
-
Vo = speed of the craft in the turn (m/s);
-
Δ = displacement (t);
-
L = length of the craft at the waterline (m); and
-
KG = height of the centre of gravity above keel (m).
This formula is applicable when the ratio of the radius of the turning circle to the
length of the craft is 2 to 4.
1.1.3 Relationship between the capsizing moment and heeling moment to satisfy the
weather criterion
The stability of a hydrofoil boat in the displacement mode can be checked for compliance
with the weather criterion K as follows:
-
 (kNm)
(kNm)
where:
1.1.4 Heeling moment due to wind pressure
The heeling moment Mv is a product of wind pressure
Pv, the windage area Av and the lever of the windage area Z.
The value of the heeling moment is taken as constant during the whole period of heeling.
The windage area Av is considered to include the projections of the lateral
surfaces of the hull, superstructure and various structures above the waterline. The
windage area lever Z is the vertical distance to the centre of windage from the
waterline and the position of the centre of windage may be taken as the centre of the
area.
The values of the wind pressure in Pascal associated with Force 7 Beaufort scale,
depending on the position of the centre of the windage area, are given in table 1.
Table 1 – Typical wind pressures, 100 nautical miles from land, for Beaufort scale
7
| Z above waterline (m)
|
1.0
|
1.5
|
2.0
|
2.5
|
3.0
|
3.5
|
4.0
|
4.5
|
5.0
|
| Pv (Pa)
|
46
|
46
|
50
|
53
|
56
|
58
|
60
|
62
|
64
|
Note: These values may not be applicable in all areas.
1.1.5 Evaluation of the minimum capsizing moment Mc
in the displacement mode
The minimum capsizing moment is determined from the static or dynamic stability curves
taking rolling into account.
-
.1 When the static stability curve is used, Mc is determined by
equating the areas under the curves of the capsizing and righting moments (or
levers) taking rolling into account, as indicated by figure 1, where θz
is the amplitude of roll and MK is a line drawn parallel to the abscissa axis such
that the shaded areas S1 and S2 are equal.
-
Mc = OM, if the scale of ordinates represents moments,
-
Mc = OM ✕ displacement, if the scale of ordinates represents
levers.
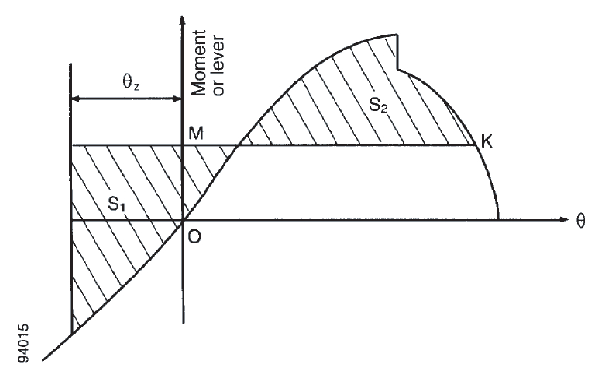
Figure 1 – Static stability curve
.2 When the dynamic stability curve is used, first an auxiliary point A should be
determined. For this purpose the amplitude of heeling is plotted to the right along the
abscissa axis and a point A' is found (see figure 2). A line AA' is drawn parallel to
the abscissa axis equal to the double amplitude of heeling (AA' = 2θz) and
the required auxiliary point A is found. A tangent AC to the dynamic stability curve is
drawn. From the point A the line AB is drawn parallel to the abscissa axis and equal to
1 radian (57.3°). From the point B a perpendicular is drawn to intersect with the
tangent in point E. The distance  is equal to the capsizing moment if measured along the
ordinate axis of the dynamic stability curve. If, however, the dynamic stability levers
are plotted along this axis,
is equal to the capsizing moment if measured along the
ordinate axis of the dynamic stability curve. If, however, the dynamic stability levers
are plotted along this axis,  is then the capsizing lever, and in this case the
capsizing moment Mc is determined by multiplication of ordinate
is then the capsizing lever, and in this case the
capsizing moment Mc is determined by multiplication of ordinate  (in metres) by the corresponding displacement (in
tons)
(in metres) by the corresponding displacement (in
tons)
-
Mc = 9.81 Δ  (kNm)
(kNm)
.3 The amplitude of rolling θz is determined by means of model
and full-scale tests in irregular seas as a maximum amplitude of rolling of 50
oscillations of a craft travelling at 90° to the wave direction in sea state for the
worst design condition. If such data are lacking the amplitude is assumed to be equal to
15°.
.4 The effectiveness of the stability curves should be limited to the angle of
flooding.
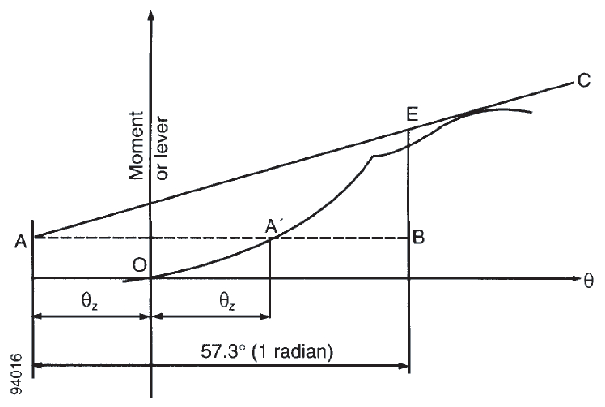
Figure 2 – Dynamic stability curve