4.1 The shortcomings of the spiral and 10°/10° zig-zag
manoeuvres may be overcome by a variation of the zig-zag manoeuvre that quite closely
approximates the behaviour of a ship being steered to maintain a straight course. This
zig-zag is referred to as a Very Small Zig Zag (VSZZ), which can be expressed using the
usual nomenclature, as 0°/5° zig-zag, where ψ is 0 degrees and δ is 5 degrees.
4.2 VSZZs characterized by 0°/5° are believed to be the
most useful type, for the following two reasons:
-
.1 a human helmsman can conduct VSZZs by evaluating
the instant at which to move the instant at which to move the wheel while sighting
over the bow, which he can do more acurately than by watching a conventional
compass.
-
.2 a conventional autopilot could be used to conduct
VSZZs by setting a large proportional gain and the differential gain to zero.
4.3 There is a small but essential difference between 0°/5°
VSZZs and more conventional similar zig-zags, such as 1°/5° zig-zag. The 0°/5° zig-zag
must be initialised with a non-zero rate-of-turn. In reality, this happens naturally in
the case of inherently unstable ships.
4.4 A VSZZ consists of a larger number of cycles than a
conventional zig-zag, perhaps 20 overshoots or so, rather than the conventional two or
three, and interest focuses on the value of the overshoot in long term. The minimum
criterion for course-keeping is expressed in terms of the limit-cycle overshoot angle
for 0°/5° VSZZs and is a function of length to speed ratio.
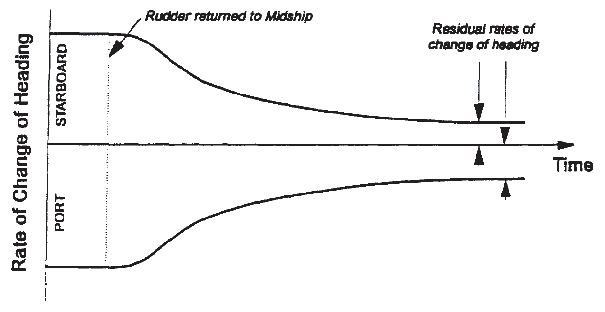
Figure A4-1 Presentation of pull-out test
results
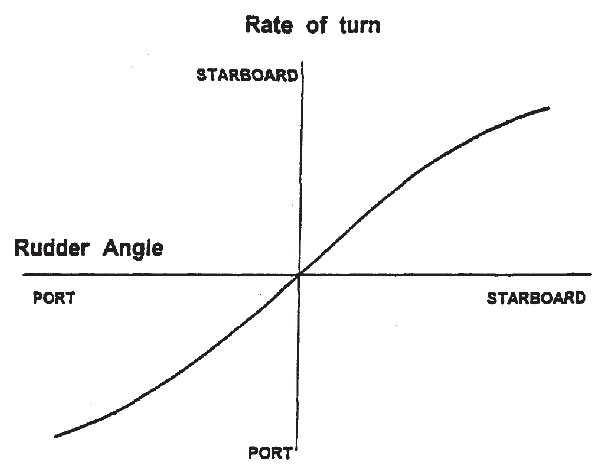
Figure A4-2 Presentation of spiral test results
for stable ship
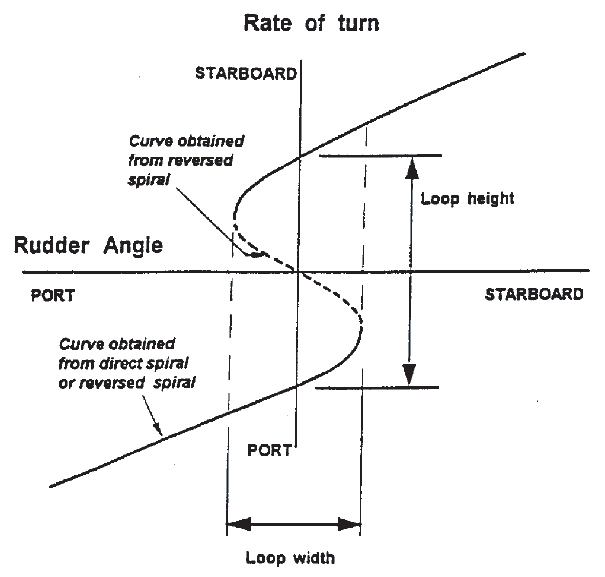
Figure A4-3 Presentation of spiral
test results for unstable ship